

 研究方向
研究方向点击次数:
六维力传感器是机器人灵巧手实现多维力与力矩精确感知与智能交互的关键基础部件,对精细化控制与复杂工况适应能力具有重要支撑作用,但在强耦合载荷、长期服役与复杂环境条件下,易受到灵敏度漂移、耦合误差和稳定性退化等问题制约;针对上述挑战,课题组聚焦六维力传感器开展了多维力解耦机理、传感结构与电测系统设计以及高精度标定与误差补偿方法的关键技术及产业化进行研究。

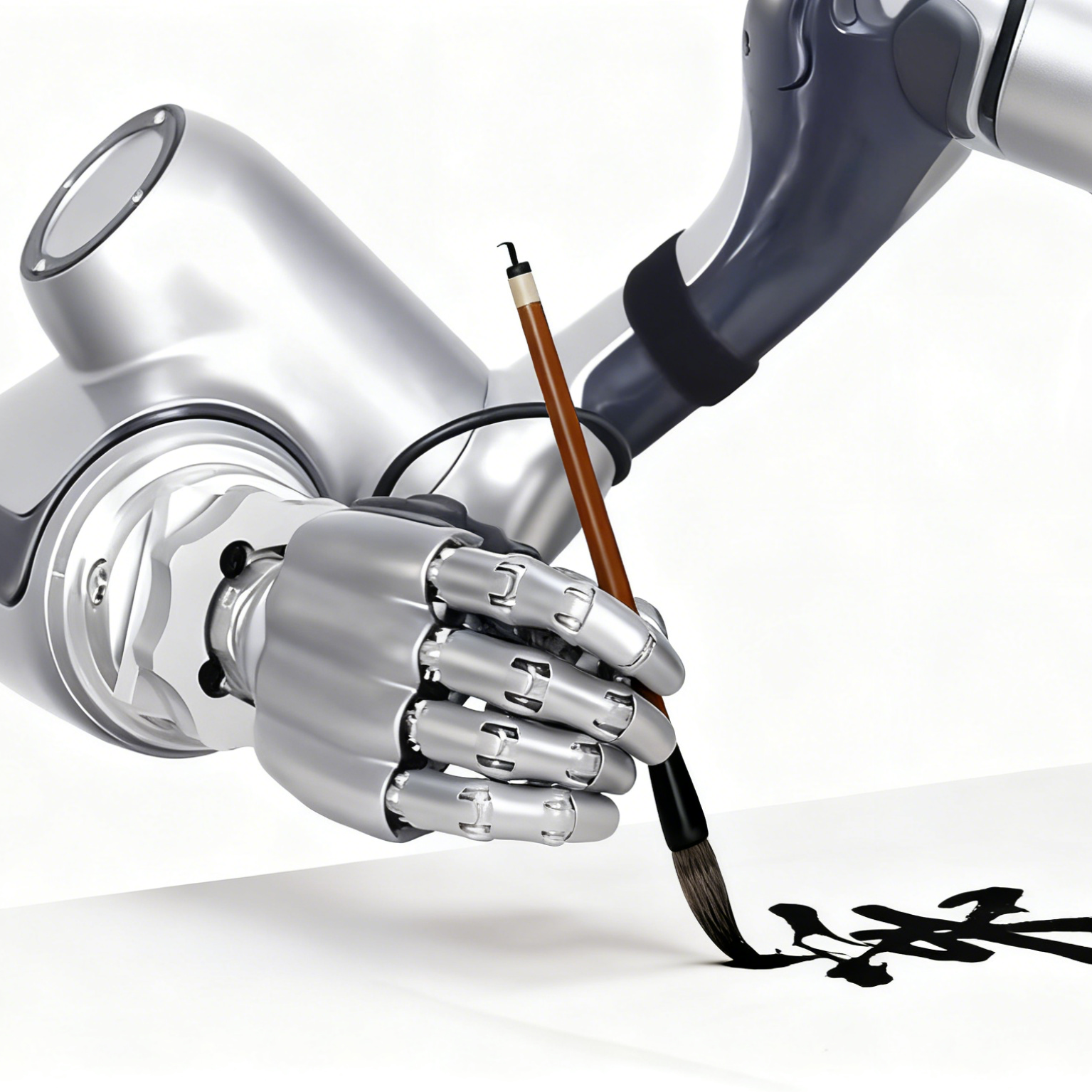
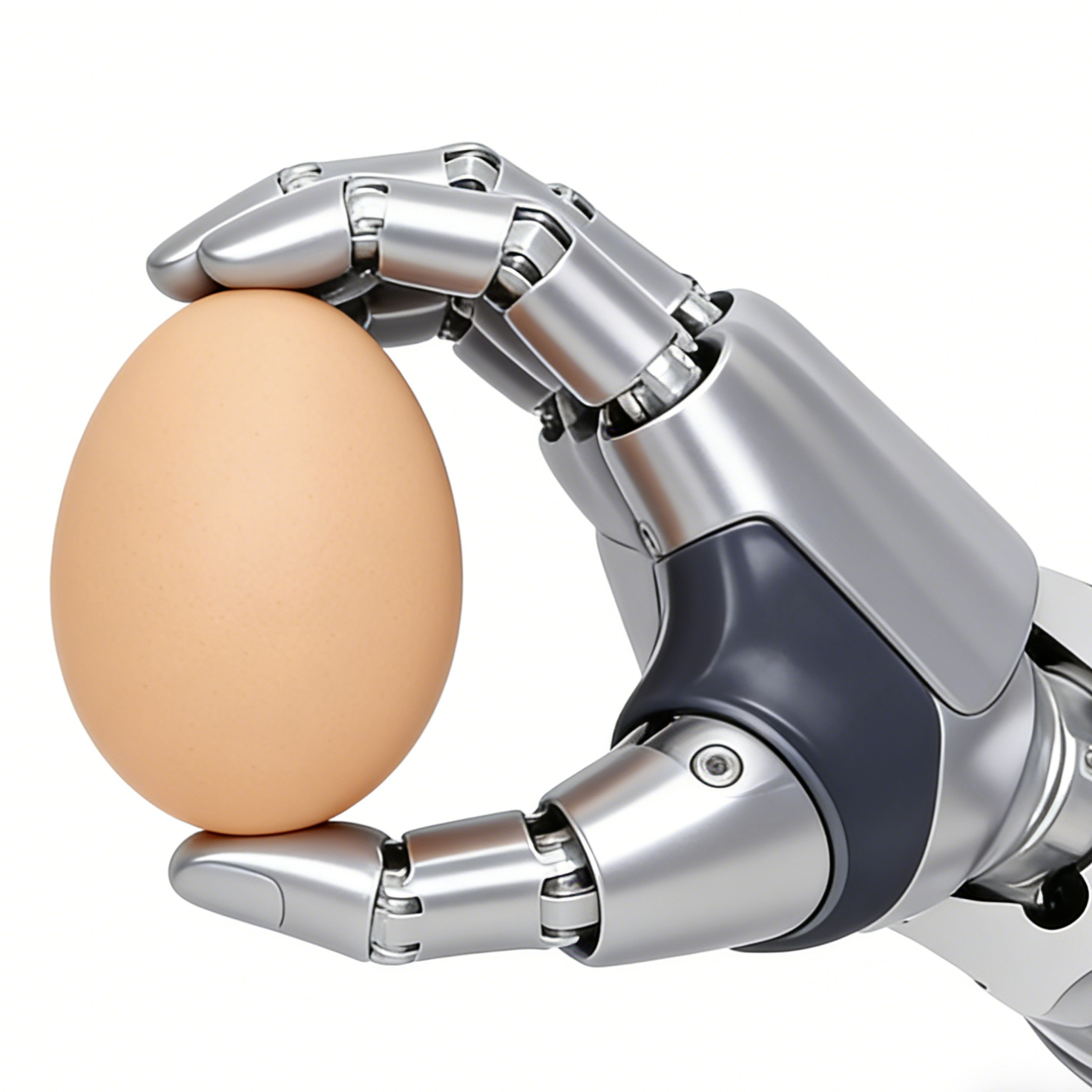
装备六维力传感器的机器人灵巧手能够在多接触、多约束和强非线性工况下实时感知抓取过程中的力与力矩信息,通过精确调控接触力分布与操作力矩,实现对拧瓶盖、书写毛笔字以及抓握鸡蛋等精细操作任务的稳定执行,充分体现了多维力感知技术在复杂操作与人机协作场景中的应用潜力。


版权所有 ©山东大学 地址:中国山东省济南市山大南路27号 邮编:250100
查号台:(86)-0531-88395114
值班电话:(86)-0531-88364731 建设维护:山东大学信息化工作办公室
访问量:次
最后更新时间:..

 返回首页
返回首页